Quando le persone sentono la frase “standardizzare la collaborazione tra macchine”, l'assunzione immediata è solitamente che si riferisca a migliorare i protocolli di comunicazione tra robot o a rendere più facile lo scambio di dati tra diversi dispositivi, tuttavia la mia prima reazione è meno incentrata sull'interoperabilità tecnica e più sulla coordinazione su larga scala, perché la vera sfida in un mondo pieno di sistemi autonomi non è semplicemente fare in modo che le macchine comunichino tra loro, ma garantire che il lavoro che svolgono insieme possa essere compreso, verificato e governato in modi che rimangano affidabili quando il sistema cresce oltre una singola organizzazione o produttore.
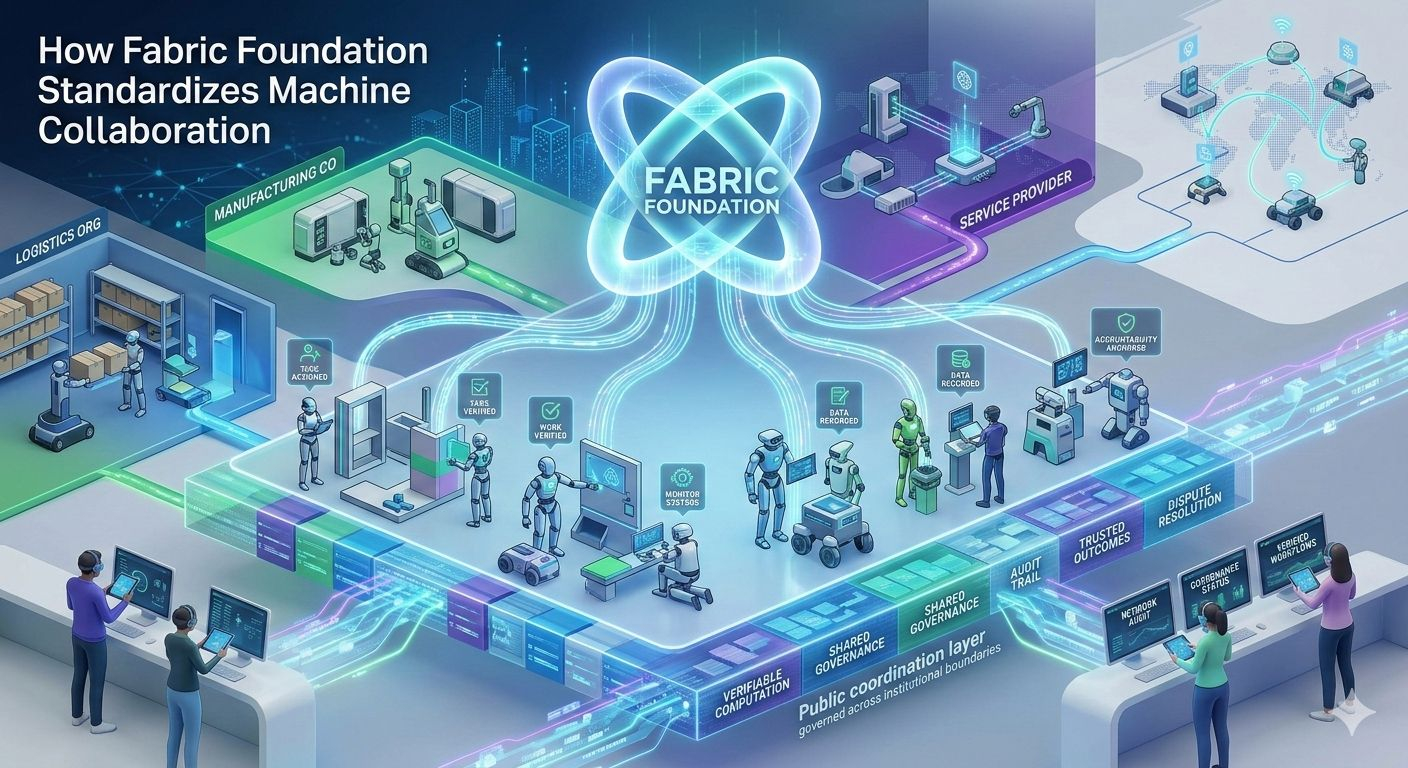
La conversazione sull'infrastruttura della robotica spesso inizia con la capacità hardware o le prestazioni dell'IA, ma la questione più profonda che plasma silenziosamente il futuro dell'automazione è l'assenza di framework di coordinamento condivisi che consentano alle macchine sviluppate da attori diversi di operare come parte di un sistema coerente piuttosto che come strumenti isolati e questo è precisamente il divario che la Fabric Foundation affronta trattando la collaborazione tra macchine non come una caratteristica del prodotto, ma come uno standard di rete che definisce come lavoro, dati e responsabilità si muovono tra agenti autonomi.
Nel modello tradizionale della robotica, la responsabilità per il coordinamento si trova quasi completamente all'interno di ambienti chiusi dove una singola azienda controlla le macchine, il software e le regole operative, il che significa che la collaborazione funziona solo finché tutto appartiene allo stesso ecosistema e segue le stesse assunzioni interne, tuttavia nel momento in cui robot di fornitori o organizzazioni diverse tentano di operare in un ambiente condiviso, il sistema inizia a rivelare attriti perché non c'è un livello neutro che registra chi ha svolto quale compito, come sono state prese le decisioni o se i risultati possono essere verificati indipendentemente.
Il design della Fabric Foundation cambia silenziosamente quella dinamica introducendo un'infrastruttura dove il lavoro delle macchine può essere espresso come computazione verificabile e registrato attraverso un livello di coordinamento pubblico, il che significa che la collaborazione smette di dipendere dalla fiducia implicita tra operatori e diventa invece un processo in cui compiti, risultati e responsabilità sono ancorati in registri condivisi che qualsiasi partecipante nella rete può interpretare e valutare.
Certo, la collaborazione non diventa più semplice semplicemente perché è registrata su un libro mastro, perché ogni interazione tra macchine contiene ancora dettagli operativi che devono essere tradotti in affermazioni strutturate su ciò che è realmente accaduto nel mondo fisico, motivo per cui il protocollo si concentra sulla definizione di come i dati, la computazione e i segnali di governance si muovono insieme in modo che l'attività delle macchine possa essere rappresentata in una forma che sia sia umani che sistemi automatizzati possano auditare senza fare affidamento su interpretazioni proprietarie.
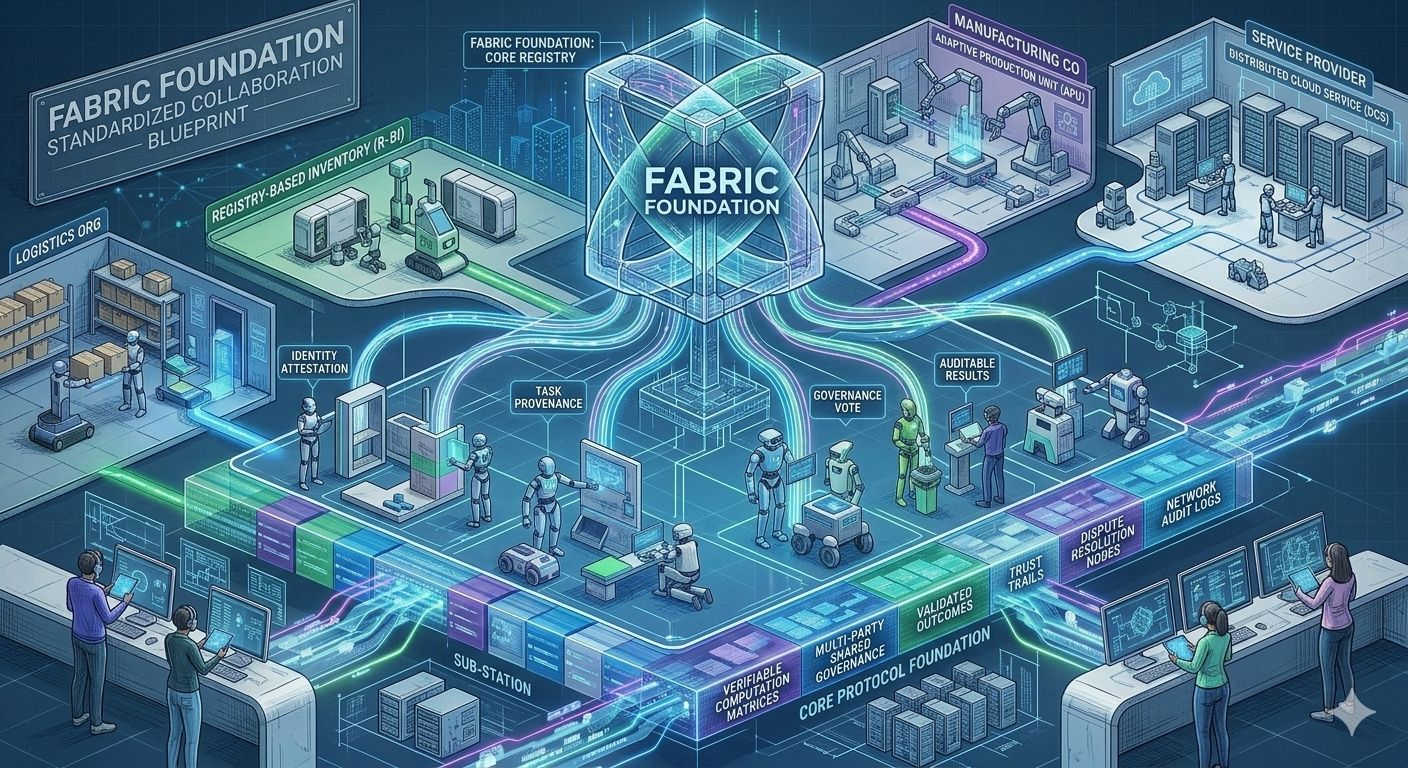
Questo cambiamento crea una conseguenza strutturale sottile ma importante che spesso passa inosservata durante le prime discussioni sull'infrastruttura della robotica decentralizzata, perché nel momento in cui la collaborazione tra macchine diventa standardizzata, l'ecosistema produce naturalmente una nuova classe di partecipanti il cui ruolo è quello di gestire il livello di coordinamento stesso convalidando i risultati computazionali, mantenendo l'integrità dei dati e garantendo che l'attività delle macchine distribuite possa essere riconciliata tra più organizzazioni senza introdurre ambiguità.
Ciò che questo significa in pratica è che la collaborazione diventa meno riguardo ai singoli robot che eseguono compiti isolati e più riguardo a reti di agenti che contribuiscono a pezzi di lavoro che formano collettivamente processi più grandi, i cui risultati possono essere verificati e governati attraverso confini istituzionali, il che è un modo fondamentalmente diverso di pensare alla robotica rispetto al modello convenzionale in cui ogni implementazione è trattata come un'isola operativa autonomamente contenuta.
C'è anche una dimensione di affidabilità che diventa più chiara una volta che alle macchine è consentito coordinarsi attraverso infrastrutture condivise, perché il successo del sistema non dipende più esclusivamente dal fatto che un singolo robot esegua correttamente le sue istruzioni, ma da se il framework circostante può mantenere registri accurati delle attività anche quando più macchine, operatori e fonti di dati interagiscono simultaneamente in condizioni mutevoli.
Nelle generazioni precedenti di automazione, i guasti si manifestavano solitamente in modi ovvi, come un malfunzionamento di un robot o una perdita di sincronizzazione in un sistema di controllo, ma quando la collaborazione è distribuita attraverso le reti, iniziano a comparire modalità di guasto più complesse nel livello di coordinamento stesso, dove dati incoerenti, verifica ritardata o regole di governance in conflitto possono influenzare come le azioni delle macchine vengono interpretate dopo che si verificano.
Questo è uno dei motivi per cui la Fabric Foundation tratta la governance come un componente strutturale della collaborazione tra macchine piuttosto che come un pensiero aggiunto una volta che i sistemi sono già in funzione, perché nel momento in cui gli agenti autonomi iniziano a interagire attraverso ambienti condivisi, qualcuno deve definire come vengono risolte le controversie, come vengono assegnate le responsabilità e come la rete si adatta quando nuove macchine o organizzazioni si uniscono all'ecosistema.
Un altro aspetto che diventa più visibile sotto questo modello è il modo in cui la fiducia si sposta dai singoli produttori di macchine verso l'affidabilità dell'infrastruttura di coordinamento che registra e convalida il lavoro delle macchine, poiché gli utenti che interagiscono con una rete di agenti autonomi raramente valutano il design tecnico di ogni dispositivo coinvolto nel processo e invece giudicano il sistema in base a se i risultati appaiono coerenti, verificabili e responsabili quando osservati dall'esterno.
Una volta che quell'aspettativa diventa la norma, il panorama competitivo della robotica inizia a evolversi in una direzione interessante, dove il successo non è misurato solo dalla sofisticazione di un singolo robot, ma da quanto efficacemente le macchine possono partecipare a flussi di lavoro condivisi, dove i loro contributi sono visibili, verificabili e governati attraverso protocolli standardizzati che si estendono oltre il controllo di qualsiasi singolo fornitore.
Questo ambiente incoraggia naturalmente gli sviluppatori a progettare macchine e agenti che operano con l'interoperabilità in mente fin dall'inizio, perché i sistemi che non possono esprimere il proprio lavoro in formati verificabili o integrarsi con livelli di coordinamento condivisi si sentiranno gradualmente isolati rispetto a quelli che possono collegarsi direttamente a reti dove compiti, computazione e supervisione sono già strutturati.
Da questa prospettiva, il risultato più importante dell'approccio della Fabric Foundation non è semplicemente la creazione di un'altra piattaforma robotica, ma l'istituzione di un framework in cui la collaborazione stessa diventa un servizio infrastrutturale, il che significa che le macchine non devono negoziare le regole di coordinamento da zero ogni volta che interagiscono, perché quelle regole sono già definite a livello di protocollo.
Quando viene vista attraverso quella lente, il significato a lungo termine della standardizzazione della collaborazione tra macchine risiede nella possibilità di costruire reti globali di sistemi autonomi il cui lavoro può essere combinato, auditato e governato con la stessa chiarezza che i moderni sistemi digitali applicano alle transazioni finanziarie o allo scambio di informazioni, creando un ambiente in cui la supervisione umana, l'autonomia delle macchine e la fiducia istituzionale possono coesistere senza dipendere interamente dal controllo centralizzato.
Il vero test di questo modello, tuttavia, non si verificherà quando i sistemi operano in condizioni prevedibili in cui la collaborazione è semplice e le esigenze di coordinamento rimangono modeste, ma durante i momenti in cui le reti di macchine devono gestire dati conflittuali, carichi di lavoro imprevedibili o dispute interorganizzative, dove l'infrastruttura deve dimostrare che i suoi meccanismi di verifica e governance sono abbastanza robusti da mantenere la fiducia anche quando la complessità aumenta.
Quindi la domanda che definisce in ultima analisi il successo della collaborazione tra macchine standardizzate non è semplicemente se i robot possano condividere compiti attraverso un protocollo decentralizzato, ma se il livello di coordinamento può sostenere la fiducia quando migliaia di agenti indipendenti interagiscono simultaneamente, quando gli incentivi economici iniziano a plasmare il comportamento all'interno della rete e quando i risultati del mondo reale dipendono dall'accuratezza dei registri che descrivono come le macchine hanno lavorato insieme per produrli.
@Fabric Foundation #ROBO $ROBO
